�\Մ��(sh��)��?j��n)zӰ�y������վ�����I(y��)�c�a(ch��n)Ʒ
���ٙ�Ŀ�����ܿƌW(xu��)���g(sh��)Փ�� �l(f��)�����ڣ�2011-02-06 07:01 ��ȣ�
����ժҪ��������Ҫ��B��(sh��)��?j��n)zӰ�y������վ�ĽM���c���ܡ����乤�������c�a(ch��n)Ʒ��
�����P(gu��n)�I�~��ȫ��(sh��)��?j��n)zӰ�y��ϵ�y(t��ng)��VirtuoZo��JX4��DPGrid����(sh��)��?j��n)zӰ�y������վ��
����0������
�����S���zӰ�y����Ӌ��C���g(sh��)�͜y�L���g(sh��)�IJ���l(f��)չ���zӰ�y���I(y��)�ѽ�(j��ng)����������ɽ����zӰ�y����ȫ��(sh��)��?j��n)zӰ�y�����^�ɡ��l(f��)չ����ȫ��(sh��)��?j��n)zӰ�y���A�Ρ���(sh��)��?j��n)zӰ�y���ǻ��ڔ�(sh��)��Ӱ���c�zӰ�y���Ļ���ԭ������(y��ng)��Ӌ��C���g(sh��)����(sh��)��Ӱ��̎����Ӱ��ƥ�䡢ģʽ�R�e�ȶ��W(xu��)�Ƶ���Փ�c��������ȡ���z�����Ô�(sh��)�ַ�ʽ���_(d��)�Ď��c������Ϣ�ĔzӰ�y���W(xu��)�ķ�֧�W(xu��)�ơ�ȫ��(sh��)��?j��n)zӰ�y������վ�������d�ĵ������zӰ�y���x����Ҳ�õ���Խ��Խ�V���đ�(y��ng)�á����H��a(ch��n)Ʒ�ǔ�(sh��)�ֵģ����������g��(sh��)��(j��)��ӛ��Լ�̎����ԭʼ�Y��Ҳ�ǔ�(sh��)�ֵġ�Ŀǰ�҂������I(y��)�г��õ�ȫ��(sh��)��?j��n)zӰ�y��ϵ�y(t��ng)��Ҫ��VirtuoZo��(sh��)��?j��n)zӰ�y������վ��JX4��(sh��)��?j��n)zӰ�y������վ�͔�(sh��)��?j��n)zӰ�y���W(w��ng)��DPGrid��
����1����(sh��)��?j��n)zӰ�y������վ�ĽM��
����1��1Ӳ���M��
������(sh��)��?j��n)zӰ�y������վ��Ӳ����Ӌ��C�����ⲿ�O(sh��)��M�ɡ�
������1�� Ӌ��C��Ŀǰ�����ǂ���Ӌ��C��PC������վ��
������2�� �ⲿ�O(sh��)�䣺���ⲿ�O(sh��)��֞����w�^�y�����������O(sh��)���cݔ��ݔ���O(sh��)�䡣
������a�� ���w�^�y�����������O(sh��)��
�������w�^�y�O(sh��)�䣺Ӌ��C�@ʾ�������������Ļ���p��Ļ�����w�^�y�b�����ԇ�����ķN֮һ��
����•�t�G���R
����•���w�����R
����•�W�]ʽҺ�����R
����•ƫ������R
�������������O(sh��)�䣺���������O(sh��)��������������N֮һ��
����•��݆���_�P�c��ͨ���(bi��o)
����•��λ���(bi��o)�c��ͨ���(bi��o)
����•��ͨ���(bi��o)
������b�� ݔ��ݔ���O(sh��)��
����ݔ���O(sh��)�䣺
����•Ӱ푔�(sh��)�ֻ��x������x��
����ݔ���O(sh��)�䣺
����•ʸ���L�D�x
����•�Ÿ��L�D�x
����1��2ܛ���M��
������(sh��)��?j��n)zӰ�y������վ��ܛ���ɔ�(sh��)��Ӱ��̎��ܛ����ģʽ�R�eܛ���������zӰ�y��ܛ�����o������ܛ���M�ɡ�
������1����(sh��)��Ӱ��̎��ܛ����Ҫ������
����•Ӱ�����D(zhu��n)
����•Ӱ��V��
����•Ӱ������
����•������ȡ
������2��ģʽ�R�eܛ����Ҫ������
����•�����R�e�c��λ���������(bi��o)���R�e�c��λ
����•Ӱ��ƥ�䣨ͬ���c�����c����R�e��
����•Ŀ��(bi��o)�R�e
������3�������zӰ�y��ܛ����Ҫ������
����•����(sh��)Ӌ��
����•�������ǜy���Y(ji��)��
����•�˾��P(gu��n)ϵ����
����•����(bi��o)Ӌ���c׃�Q
����•��(sh��)ֵ��(n��i)��
����•��(sh��)���ּm��
����•ͶӰ׃�Q
������4���o������ܛ����Ҫ������
����•��(sh��)��(j��)ݔ��ݔ��
����•��(sh��)��(j��)��ʽ�D(zhu��n)�Q
����•עӛ
����•�|(zh��)�����
����•�D�����
����•�˙C����
����2����(sh��)��?j��n)zӰ�y������վ�Ĺ���
����1��?d��ng)zӰ��(sh��)�ֻ�
�������ø߾���Ӱ��(sh��)�ֻ��x������x������Ƭ��ؓ(f��)������棩�D(zhu��n)���锵(sh��)��Ӱ��
����2��?d��ng)zӰ̎��
����ʹӰ��������c������m��ɫ���m�ȡ���λ���_��
����3���y��
����•�������y��������ȡ�c��λ���Ԅӆ���y�������������y��
����•�p�����y��Ӱ��ƥ�䣨�Ԅ��p�����y�����������w���y��
����•�������y����Ӱ���g��ƥ�䣨�ԄӶ������y����������Ӱ�����y��
����4��Ӱ��λ
������1����(n��i)����
�����ڿ��(bi��o)�İ��Ԅ��c�Ԅ��R�e�c��λ�Ļ��A(ch��)�ϣ����ÿ��(bi��o)�ęzУ����(bi��o)�c��������(bi��o)��Ӌ���������(bi��o)ϵ�c��Ƭ����(bi��o)ϵ�g��׃�Q����(sh��)��
������2����������
������ȡӰ���е������c�����ö��S���P(gu��n)����ͬ���c��Ӌ����������(sh��)���������y��C��Ӱ�����M(j��n)�Ѓ�(n��i)�����ֱ���M(j��n)����������r�����������������ֱ�ӽ⡣������Ӱ��(sh��)��(j��)�Y(ji��)��(g��u)�c��С����Ӱ��ƥ�䷽��һ�㶼Ҫ������������^�̣��˹��o�����y�ЕrҲ����Ҫ�ġ����y(t��ng)�ĔzӰ�y��һ��ֻ�����^�Ę�(bi��o)��(zh��n)�cλ���y����ͬ���c����(sh��)��?j��n)zӰ�y�������Ԅӻ��c�ɿ��ԵĿ��]��ͨ��Ҫƥ�䔵(sh��)ʮ����(sh��)�ٌ�ͬ���c��
������3���^������
�����F(xi��n)�A����Ҫ���˹������ң�Ӱ���c�����c����Ӱ��ƥ��_��ͬ���c��Ȼ��Ӌ��^������(sh��)������п�������Ӱ��ƥ�似�g(sh��)������Ӱ���M(j��n)��ƥ�䣬���F(xi��n)�Ԅӽ^������
����5���Ԅӿ������ǜy��
���������ԄӃ�(n��i)�����B�m(x��)�������Ԅ����������Ԅ��x�c���Ԅ��D(zhu��n)�c��ģ���B�ӡ�������(g��u)�ɡ���(g��u)�����ɾW(w��ng)�����ɾW(w��ng)ƽ��ֲ����������c���Ԅ����y�c�^(q��)��W(w��ng)ƽ�����ȡ����ڔ�(sh��)��?j��n)zӰ�y������Ӱ��ƥ������˹��D(zhu��n)�̵��Ԅӻ�̎�����ɘO�����߿������ǜy����Ч�ʡ�
�������y(t��ng)�Ŀ������ǜy��һ��ֻ�ژ�(bi��o)��(zh��n)�cλ�x�c����(sh��)��?j��n)zӰ�y�����Ԅӿ������ǜy�����x�c�r�����HҪ�^����B���c�������ڴֲ�������߿ɿ��ԣ�߀Ҫ���Cÿһģ�͵���߅���^����c�������ں��m(x��)̎��������ģ��DEM��߅��ʸ����(sh��)��(j��)�Ľ�߅��
����6����(g��u)�ɺ˾�Ӱ��
�������պ˾��P(gu��n)ϵ����Ӱ��ĻҶ��غ˾����������������У���(g��u)�ɺ˾�Ӱ���Ա����w�^�y�������SӰ��ƥ���D(zhu��n)����һ�SӰ��ƥ�䡣
����7��Ӱ��ƥ��
�����M(j��n)���ܼ��c��Ӱ��ƥ�䣬�Ա㽨����(sh��)�ֵ���ģ�͡�
����8�� ������(sh��)�ֵ���ģ�ͼ��侎
�������ܼ��cӰ��ƥ��ĽY(ji��)���c����Ԫ��Ӌ��ͬ���c�ĵ�������(bi��o)�������õ���Ԫƥ�䷽�����t�o��˲�����Ȼ���(n��i)��W(w��ng)�c�߳̽������θ�W(w��ng)DEM��ֱ�Ә�(g��u)��TIN��
����9���Ԅ��L�Ƶȸ߾�
�������ھ��θ�W(w��ng)DEM��TIN��ۙ�ȸ߾���
����10����������Ӱ��
�������ھ��θ�W(w��ng)DEM�c��(sh��)���ּm��ԭ������������Ӱ�����ɷN;������һ�������w����DEM����������Ӱ�ڶ����Ɇη�Ӱ���c���е�DEM��������Ӱ���@��Ҫݔ��ԓӰ��ą���(sh��)�����y���ɿ����c���Æ�Ƭ������ԓӰ��ą���(sh��)��
����11������Ӱ���Ƕ�c���a
��������(j��)��������Ӱ���دB���ֵIJ������������Ӱ���M(j��n)�Ў��cɫ�ʻ�Ҷȵ��{(di��o)�������_(d��)���o�p�Ƕ��������Ӱ�����ړ����IJ��֣���������Ӱ��K���m��(d��ng)?sh��)ļy�����档
����12��?d��ng)?sh��)���L�D
�������ڔ�(sh��)��Ӱ��ęC�����y��ʸ��������̖�����_(d��)�cעӛ��
����13�� ����Ӱ��؈D
����ʸ����(sh��)��(j��)���ȸ߾��c����Ӱ��B�ӣ�����Ӱ��D�؈D��
����14�� ҕ�D�����^�D
��������(j��)ҕ׃�Qԭ���cDEM����ҕ�D��������Ӱ��B�ӵ�DEMҕ�D�������挍���S���^�D��
����15���������wƥ��Ƭ
��������(j��)DEM����ҕ�������Ӱ���������wƥ��Ƭ��������ԭʼӰ���������wƥ��Ƭ����DEM�c����Ӱ�����������wƥ��Ƭ���ܷ�ӳ�������|(zh��)�ĸ߶ȣ���DEM�cԭʼӰ�����������wƥ��Ƭ�܉�ӳ�������|(zh��)�ĸ߶ȡ�
����3����(sh��)��?j��n)zӰ�y������վ�����I(y��)��ʽ
����ԭ�t�ϣ���(sh��)��?j��n)zӰ�y������վ�nj�Ӱ���M(j��n)���Ԅӻ����y�c�R�e��ϵ�y(t��ng)������(sh��)��?j��n)zӰ�y��̎�ڰl(f��)չ�����ڣ���Ӱ��������Ϣ���Ԅ���ȡ——�Ԅ��R�e������о�߀�dz��֜\����ʹ�ڌ�Ӱ�����Ϣ���Ԅ���ȡ——�Ԅ����y��Ҳ߀�����S����Ҫ�о��ͽ�Q�Ć��}����ˣ��ڬF(xi��n)�A�������I(y��)��ʽֻ�����Ԅӡ����ԄӼ��˹��������N��ʽ��Y(ji��)�ϡ�
����3�� 1�Ԅӻ��c�˹����A(y��)
�������Ԅӻ����I(y��)��B(t��i)��“���I(y��)”����(y��ng)�o���κ��˹����A(y��)��ϵ�y(t��ng)�o��̎���Ć��}��(y��ng)ԓ�Ԅ�ӛ������o�˹��M(j��n)�к�̎�������������ʹ����ϵ�y(t��ng)ֹͣ����ȥ�ȴ��˹����A(y��)��ϵ�y(t��ng)��(y��ng)ԓ�^�m(x��)�������\����ȥ���˹����A(y��)��(y��ng)���Ԅӻ�̎����“�A(y��)̎��”��“��̎��”���@����ζ�����Ԅӻ������I(y��)�^���c�˹����A(y��)����һ���������^�̣����Ƿ��_���ăɂ����֡��˹����A(y��)�����Ԅӻ�ϵ�y(t��ng)��“�A(y��)̎��”�c“��̎��”���Լ�������ʽ���Ԅ����I(y��)��(zh��n)�估�ƺ��������Ҫ�Ĕ�(sh��)��(j��)��(zh��n)�䡢��Ҫ���o��(d��o)���y�����ȼ�̎���Ԅӻ��^�����������Пo����Q�Ć��}�����˲����O(sh��)Ӌ�Ĕ�(sh��)��?j��n)zӰ�y������վ���m߀��Ҫ“�˹����A(y��)”������������̎���ķ�ʽ���ܳ�ְl(f��)�]ϵ�y(t��ng)��Ч�ʡ�
����3��2�˹����A(y��)�c���Ԅӻ�
�����ڔ�(sh��)��?j��n)zӰ�y������վ�У��˹��ĸ��A(y��)����(y��ng)�cģ�M�c�����y�D�е���ͬ�����ڴ����(sh��)��r�£�ֻ�����I(y��)�ˆT�oһ�����ε�“ָʾ”�������λ�á������ֵ��ϵ�y(t��ng)�����Ԅӵ�̎�����˕r�mȻ�����Ԅӻ����M(j��n)��̎������Ȼ���ڰ��Ԅӻ������@�N���Ԅӻ���������y�D�cӋ��C�o���y�D����(sh��)�֜y�D���еİ��Ԅӻ������Ԅӻ��ij̶Ȅt���M(j��n)һ�����e��Ҫָ�����ǣ��ڔ�(sh��)��?j��n)zӰ�y������վ�У��ֵ��˹����A(y��)�c���Ԅӻ���̎������Ȼ�ǽ�����Ӱ��ƥ����������۵����w�^�y��������������ȡ�c��λ�������˹��Č��r���y��
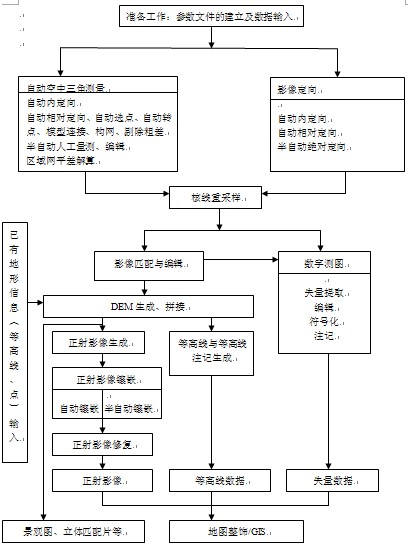
����4����(sh��)��?j��n)zӰ�y������վ�Ĺ�������
������(sh��)��?j��n)zӰ�y������վ��һ��������D��ʾ��
����5����(sh��)��?j��n)zӰ�y������վ�Įa(ch��n)Ʒ
������(sh��)��?j��n)zӰ�y������վ����Ҫ�a(ch��n)Ʒ������
����•�zӰ����(sh��)���������ǜy�����ܳɹ���Ӱ����Y(ji��)����
����•��(sh��)�ֵ���ģ��DEM����(sh��)�ֱ���ģ��DSM��
����•��(sh��)�ֵ؈D
����•��(sh��)������Ӱ��D
����•ҕ�D�����^�D
����•���^�����wģ��
����•���N����Ӌ����������S��Ϣ
����•���N��Ϣϵ�y(t��ng)����(sh��)��(j��)������Ŀ��g��Ϣ
����6���Y(ji��)���Z
�������ڔ�(sh��)��?j��n)zӰ�y���r���ĵ������҂����܃H�H�J(r��n)������һ�����g(sh��)���M(j��n)��������Ҫ���ǣ��҂���(y��ng)ԓ���ѵ��J(r��n)�R�������҂��ČW(xu��)�ơ����a(ch��n)����(y��ng)���I(l��ng)���Լ����c�����W(xu��)�Ƶ��P(gu��n)ϵ�����a(ch��n)������̵�Ӱ푲����˾��׃�����ʹ˶������҂�����ҕ�c˼������ȡ����(y��ng)�����a(ch��n)��ˇ���̣���������(d��o)�҂��y�L�I(y��)�������ǰ�l(f��)չ��
����
���������īI(xi��n)
����1������ף����ڈԡ��zӰ�y���y�D��ȫ��(sh��)�ֻ���·����h�y�L�W(xu��)Ժ�W(xu��)��1985��3��
����2����֮���zӰ�y��ԭ�����������y�L�����磬1979
����3������ף������塣��(sh��)��?j��n)zӰ�y���W(xu��)����h����h�y�L�Ƽ���W(xu��)�����磬1996
����4������ף������塣��(sh��)��?j��n)zӰ�y���İl(f��)չ����(y��ng)�á��y�Lͨ����1997��6����30~40
����(bi��o)�}���\Մ��(sh��)��?j��n)zӰ�y������վ�����I(y��)�c�a(ch��n)Ʒ
�D(zhu��n)�dՈע�����ԣ�http://www.wangshangbanli.cn/fblw/dianxin/zhineng/6924.html
���P(gu��n)���}���
�zӰˇ�g(sh��)�I(l��ng)��AHCI�ڿ����]��Phot...�P(gu��n)ע:106
Nature���¶��W(xu��)���ӿ�Nature Com...�P(gu��n)ע:152
��С�W(xu��)�̎�ֵ���˽⣬�@Щ�����W(xu��)...�P(gu��n)ע:47
2025�ꌑ����W(xu��)Փ�Ŀ����õ�19��...�P(gu��n)ע:192
�y�L�I(l��ng)��Ƽ������ڿ��x�� �p����...�P(gu��n)ע:64
���r�_Փ�ęz���C������Ҫ�P(gu��n)ע:52
�Ї�ˮ�a(ch��n)�ƌW(xu��)�ڿ��Ǻ����ڿ����P(gu��n)ע:54
���H������Ҫ�˽�Ć��}����P(gu��n)ע:58
���������ܷ��u�Q���P(gu��n)ע:48
��ŌW(xu��)����Щ��Ͷ���SCI�ڿ���ֵ...�P(gu��n)ע:66
ͨ�Ź����ИI(y��)Փ���x�}�P(gu��n)ע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�P(gu��n)ע:121
�u�Q�l(f��)Փ�ĺ�߀�dz������P(gu��n)ע:68
��(f��)ӡ���Y����Ҫ�D(zhu��n)�d��Դ�ڿ���...�P(gu��n)ע:51
Ӣ���ڿ����峣Ҋ��Փ�Ġ�B(t��i)����...�P(gu��n)ע:69
Web of Science ���ĺϼ��ڿ��u��...�P(gu��n)ע:59
�����ϢՓ�ķ���
���ܿƌW(xu��)���g(sh��)Փ�� �V���ҕՓ�� ��늼��g(sh��)Փ�� Ӌ��C��Ϣ����Փ�� Ӌ��C�W(w��ng)�j(lu��)Փ�� Ӌ��C��(y��ng)��Փ�� ͨ��Փ�� ��Ϣ��ȫՓ�� ��ӑ�(y��ng)��Փ�� ��Ӽ��g(sh��)Փ�� �����t(y��)�W(xu��)����Փ�� ܛ���_�l(f��)Փ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^(q��)
- MEAT SCIENCE�ڿ������п�Ժ�օ^(q��)
- MECCANICA�п�Ժ�ׅ^(q��)
- MECHANICAL ENGINEERING�п�Ժ�օ^(q��)
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^(q��)
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^(q��)
- Mechanics of Solids�п�Ժ�օ^(q��)
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^(q��)
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^(q��)
- MECHATRONICS�s־���п�Ժ�ׅ^(q��)